MRI-guided transperineal robot system for prostate interventions
So far, two pneumatic transpreneal robots have been introduced at the Johns Hopkins University with collaboration of the Brigham and Women Hospital (Harvard Med School), Acoustic Med system, and Queen's University for prostate intervention under MRI guidance. These robots have been designed to position and orient a surgical needle (biosy, seed injector, marker placement, etc) toward a target inside prostate under MRI guidance.

However, the insertion process itself is still carried out manually. Hence, the patient has to be pulled out of the bore twice each shot (once for manual insertion followed by taking a confirmation image, and once to remove the sample tissue). These in-and-out moves cause many inaccuracies and lengthen the process duration. So, one of our current objective is to design and implement a remotely actuated MR compatible needle driver module to be installed on the top of the transpreneal robot. The first prototype of this needle driver is going to be a 1 DOF master-slave system under MRI real time visual feedback, as well as force feedback from the needle-tissue interaction. Beside the accuracy improvement and significantly reducing the procedure duration, the main benefit of having real-time haptic feedback is to enable surgeon to differentiate the cancerous tissue from the surrounding healthy tissues. While designing the needle insertion module, we might need to modify the robot architecture as well as the way of actuation (replacing pneumatic with piezo actuators). The final prototype of this needle driver module should be able to mimic the real needle insertion procedure which is not necessarily a single DOF system due to multiple DOF nature of the forces applied to the needle caused by the bending of the needle during insertion. Also, our master robot has to be MR compatible, as well, since surgeons prefer to have the master console beside them in scanner room.
The final step toward the goal of a fully actuated robot for prostate intervention is to design a multiple shot biopsy gun which can work inside the MRI bore. In this way, the patient will be moved out of the bore only when the whole biopsy procedure is totally done as it opposed to the current single shot biopsy needles in which we need to pull out the patient once a shot.
MRI-guided transrectal robot system for prostate interventions
MRI imaging has a high sensitivity for detecting prostate tumors. Unfortunately, MR imaging alone, without concurrent biopsy, suffers from low diagnostic specificity.Therefore, our primary objective was to develop a prostate biopsy system that couples superior imaging quality with accurate delivery hardware, inside a conventional MRI scanner. The challenge was three-fold:
- Conventional high-field MRI scanners apply whole-body magnets that surround the patient completely and do not allow access to the patient during imaging. The workspace inside the magnet is extremely limited, so conventional medical robots and mechanical linkages do not fit in the magnet.
- Due to the strong magnetic field, ferromagnetic materials and electronic devices are not allowed to be in the magnet, which excludes the use of traditional electro-mechanical robots and mechanical linkages.
- A real-time in-scanner guidance method is needed to operate the device.
The device is secured to the table of the scanner with an adjustable mount that allows for flexible initial positioning. The patient is positioned comfortably on the scanner’s couch in prone position with slightly elevated pelvis and the device is introduced to the rectum. A thin rigid sheath attached around a tubular obturator makes contact with the rectum, while the obturator can slide smoothly inside the sheath. The sheath prevents the obturator from causing mechanical distortion to the rectum wall and prostate while it is moving inside the rectum. After a satisfactory initial position is achieved, the mount is secured to hold this position. Using the sliding table of the scanner, the patient and device are moved into the scanner’s magnet. The MRI scanner produces signal with the patient and device in the field, at the same time. Using signal-processing tools, we determine the spatial relationship between the device and the coordinate system of the MRI scanner. The images are transferred to a computer that produces a 3D representation of the device superimposed on the anatomic images. The physician interacts with the display and selects the target point for the needle. The computer calculates the kinematic sequence to bring the needle to the selected target position. The device realizes 3-DOF motion: translation of the end-effector inside the rectum, rotation of the end-effector around the axis of translation, and the depth of needle insertion. The order of translation and rotation are interchangeable, but both must be completed before the needle is inserted. The computer can also simulate the sequence of motions by moving a 3D model of the device, so that the physician could verify that the calculated sequence of motions would indeed take the needle from its current position to the pre-selected target position. The computer displays the three motion parameters to the operator. While the actuation of the device is in progress, the MRI scanner is collecting images in continuous mode and sends them immediately to the treatment monitoring computer. The computer processes the image data and visualizes the current image, with the model of the device superimposed in the scene, allowing the physician to monitor the motion of the device toward its target. The three parameters of motion (translation, rotation, insertion depth) are recalculated in each imaging cycle, enabling real-time dynamic control of the device.

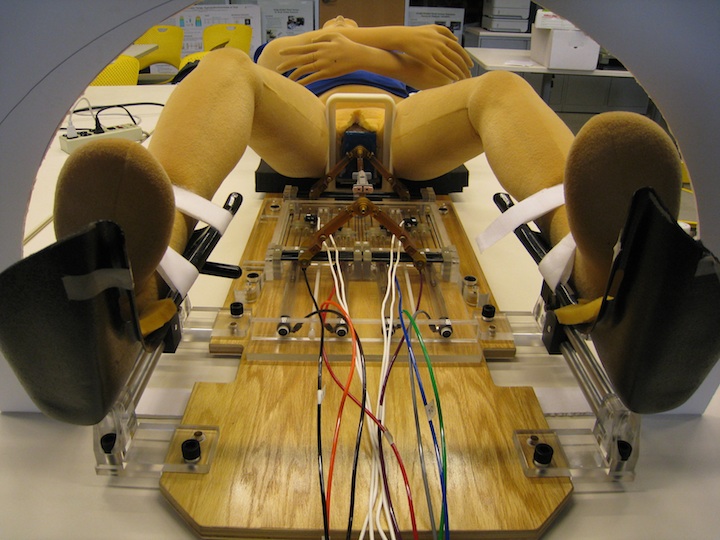
The assembly of the human-grade transrectal needle placement robot.